Driving around¶
Warning
Currently the robot is controllable via multiple interfaces. At the moment this does assume you have two motors called ‘left’ and ‘right’. Please make sure that your settings are correct.
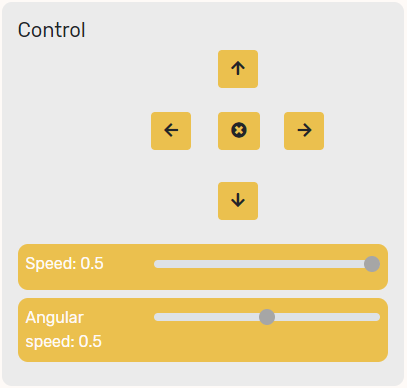
From web interface¶
The robot can be controller from the web interface by goin to the ‘control’ tab:
Teleop Key¶
In ROS you can also drive around with your keyboard:
mirte$ roslaunch mirte_teleop teleopkey.launch
Android¶
There is also an Android app which allows you to control Mirte (or any ROS-based robot). You can download ROS-mobile here. In order to drive around you need to connect to the robot:
Master URL: <your robot ip>
Master port: 11311
Wi-Fi: <connect to the same network as the robot>
In the details tab you still need to add the Joystick widget and set the topic name:
Topic Name: /mobile_base_controller/cmd_vel
You can now drive around in the ‘viz’ tab. When a USB camera is attached you can also view the image stream. You nees to add a Camera widget in teh details tab and set the topic name:
Topic Name: /webcam/image_raw/compressed